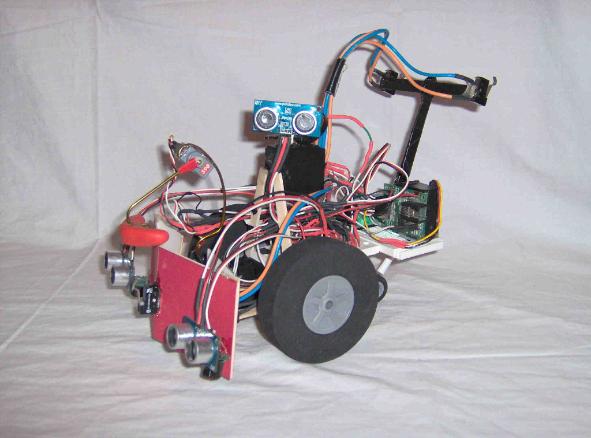
| This is “Timmay” the ULTIMate TABLEBot all wired up and ready for programming. He features differential servo driven 3.5” wheels, PROTOBot bumper, dual downward facing IR sensors for sensing the “ledge”, forward facing differential Ping! sensors for sensing the “block”, dual servo coat-hanger-wire arm and gripper w/ “Bake and Bend” Sculpy claw, palm switch for verifying “block” acquisition, Upper level swiveling Ping! for finding the “box”, speaker for a “beep-beep” voice, servo actuated dual rearward tablespace sensor and reed- switch/passive caster wheel based mobility detector. All controlled by a BS2 Stamp and Mini Serial Servo Controller (MSSCII). Rube Goldberg would be proud! My goal with this build is to use all 16 pins on the BS2 whether I need them or not. It'll be both a totally pimped out PROTOBot and the Ultimate TABLEBot. I have 3 more Stamp ports and two more available connections for the servo controller. Front and rear CdS cells and a microphone come to mind; any other ideas or suggestions? camp@camppeavy.com |
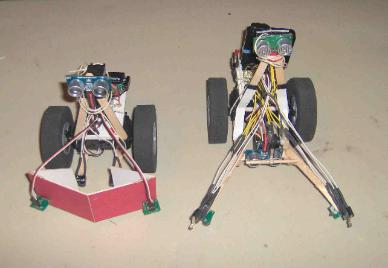
| Ultimate PROTOBot #13 and Buggy; both TABLEBots. |
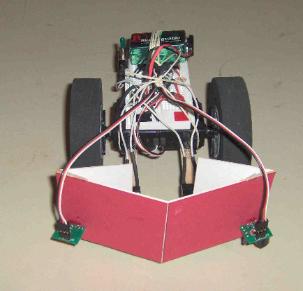
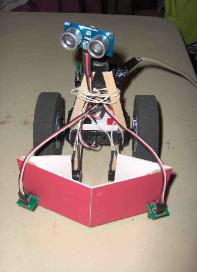
| Installing the downward facing IR sensors. |
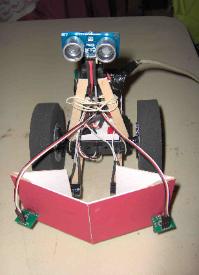

| #13's swiveling “Ping!” sensor. These ultrasonic sensors are great if you haven't tried them. One wire transmits and receives! Note the extensive use of Popsicle-stick technology. |